Scientists have been using Abaqus to develop new materials and machines based on natural designs and structures.
Two engineering fields that are advancing rapidly are soft robotics and biomimicry; in fact, the two areas often overlap. Taking inspiration from nature is a concept that has been around for a while, and it is fascinating to see how sea creatures, spiders, and birds, just as a few examples, can drive the development of medical devices, search and rescue equipment, and much more. Many of these innovations have been created with the help of simulation, and three recently published papers describe how their biomimetic inventions were assisted with SIMULIA tools – specifically, Abaqus.
The Marianas snailfish, named for its Mariana Trench habitat, is the deepest-dwelling fish ever discovered, living below 26,600 feet under the surface. Depths like these are extremely difficult to explore, but a group of scientists took inspiration from the snailfish to build a soft, swimming robot that they successfully tested at depths of nearly 36,000 feet in the Mariana Trench and about 10,500 feet in the South China Sea.
As the water pressure at such depths is extremely high, it seems unlikely that anything soft could survive – but the snailfish is so soft that it actually disintegrates when brought to the surface. The water pressure is actually what holds its body together. Inspired by the snailfish’s design, the scientists created a soft robot whose electronics are encapsulated in a polymeric matrix. The robot, also like the snailfish, moves via flapping fins.
The scientists used Abaqus to create a Finite Element Analysis model of the centralized and decentralized electronics, to validate the mitigation of stress at the interfaces between the electronic components. They also used Abaqus to model the the robot’s flapping motion. The entire study can be accessed here.
Another group of scientists developed ultra-fast soft robots whose movements are inspired by nature. High speed in soft robots allows them to grip fast-moving objects and quickly respond to dynamic surroundings. The robots described in this study are able to walk, swim, levitate, transport cargo, squeeze into a vessel smaller than themselves and momentarily close around a living fly.
These robots are designed using a magnetic elastomer that enables them to achieve extremely fast actuation with large deformations, superior even to natural processes, according to the scientists. One of the robots took the form of a flower that can close around a fly momentarily, much faster than a Venus Flytrap. The robot then released the fly unharmed. Other designs included one-armed, two-armed, rectangular and trapezoid-shaped robots.
The scientists used Abaqus/Standard to simulate the behavior of the magnetic robots. They also performed a practical demonstration in which a triangle-shaped swimming robot was inserted and released into a narrow syringe, manipulated by a magnetic field. The robot, upon insertion, wrapped itself to fit in the narrow pipette. When released into ethanol solution, it regained its initial dimensions and continued swimming.
The full study can be accessed here.
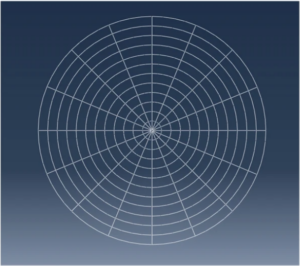
A third article focuses on spider webs, which are remarkable for their high-tension strength and high-efficiency energy absorption. Scientists have been studying spider silk in terms of adapting its properties for structural engineering, and this particular study uses finite element analysis with Abaqus to investigate the nonlinear characteristics in the large-amplitude free vibration of imperfect spider web structures.
Spider webs may look delicate, but they are actually extremely strong and flexible, experiencing tremendous deformation when catching prey but still remaining intact. The scientists in this study examine the linear and geometric nonlinear behavior of these webs, analyzing four different web structures: spiral imperfect spider web, radial imperfect spider web, central imperfect spider web, and circular rings imperfect spider web.
According to the study, there has been interest in adapting spider web engineering technology particularly in the fields of defense and medicine, with applications including microscopes, telescopes and bomb guiding systems. Spider webs can absorb the kinetic energy of prey or other external forces and dissipate about 70 percent of the converted energy, a concept which could be applied to body armor for ballistic protection. Silk materials can also be made into degradable sutures to reduce rejection and help blood clotting. In addition, spider silk structure can enhance the strength and stiffness of fibers such as those used in elevator ropes and high strength cables.
The full study can be accessed here.
These are just a few examples of how Abaqus is being used to study the structures found in nature and apply them to engineering. Scientists are turning to SIMULIA’s finite element analysis software to help them learn the behavior of natural materials and mechanisms, and to utilize that behavior in innovations that can enhance our lives in a variety of ways.



